linux进程管理-1描述符和状态

1、task_struct数据结构
描述进程状态的基础数据结构名称是task_struct,在内核的include/linux/sched.h中定义。
随着内核的发展,这个结构体里的内容越来越多,6.6的版本上,现在直接800+行,下边截取一些关键的片段。
struct task_struct {
#ifdef CONFIG_THREAD_INFO_IN_TASK
/*
* For reasons of header soup (see current_thread_info()), this
* must be the first element of task_struct.
*/
struct thread_info thread_info;
#endif
unsigned int __state; // 进程的几种状态,running、dead、zombie、d状态等
......
int prio; // 进程优先级
int static_prio;
int normal_prio;
unsigned int rt_priority;
struct sched_entity se; // 进程的调度数据结构
struct sched_rt_entity rt;
struct sched_dl_entity dl;
const struct sched_class *sched_class;
#ifdef CONFIG_CGROUP_SCHED
struct task_group *sched_task_group; // 进程调度的cgroup组
#endif
......
unsigned int policy;
int nr_cpus_allowed; // 允许调度的CPU
const cpumask_t *cpus_ptr; // 进程所在的CPU mask数据结构
cpumask_t *user_cpus_ptr;
cpumask_t cpus_mask;
void *migration_pending;
struct sched_info sched_info; // 有关任务调度的统计信息
struct list_head tasks;
struct mm_struct *mm; // 进程的内存相关信息
struct mm_struct *active_mm;
...... // 后边都是表示内存的数据结构
struct restart_block restart_block;
pid_t pid; // 表示进程基础的pid和tgid(进程组号)
pid_t tgid;
/* Real parent process: */
struct task_struct __rcu *real_parent; // 一个双向链表原来管理task struct(创建该进程的父进程)
/* Recipient of SIGCHLD, wait4() reports: */
struct task_struct __rcu *parent; // 接收到 SIGCHLD 信号的进程
/*
* Children/sibling form the list of natural children:
*/
struct list_head children; // 树状结构来管理各个task strcut
struct list_head sibling;
struct task_struct *group_leader;
/* PID/PID hash table linkage. */
struct pid *thread_pid; // 各个task struct的hash表
struct hlist_node pid_links[PIDTYPE_MAX];
struct list_head thread_group;
struct list_head thread_node;
/*
* executable name, excluding path.
*
* - normally initialized setup_new_exec()
* - access it with [gs]et_task_comm()
* - lock it with task_lock()
*/
char comm[TASK_COMM_LEN]; //进程名,最大16个字符
struct nameidata *nameidata;
/* Filesystem information: */
struct fs_struct *fs; // 进程的文件系统相关资源
/* Open file information: */
struct files_struct *files; // 进程的文件相关资源
/* Signal handlers: */
struct signal_struct *signal; // 进程调度信息
/* Protection against (de-)allocation: mm, files, fs, tty, keyrings, mems_allowed, mempolicy: */
spinlock_t alloc_lock; // 该进程的旋锁
struct wake_q_node wake_q; // 用来唤醒进程调度,即调度的时候体现出来的wakeup事件
/* CPU-specific state of this task: */
struct thread_struct thread;
/*
* WARNING: on x86, 'thread_struct' contains a variable-sized
* structure. It *MUST* be at the end of 'task_struct'.
*
* Do not put anything below here!
*/
};
从task_struct中可以不难看到,内核中管理各个进程的方式一共有三种:
- 双向链表
- 树
可以比较方便的用来查看进程之间的父子关系
- 哈希
其实主要是通过一个表示进程pid的hash来管理,方便通过pid号直接找到对应进程的task_struct信息。
通过kernel/pid.c里的相关函数进行管理,比如find_pid_ns或者find_vpid,而网上常说的其实早已经被删除了。
#define pid_hashfn(x) hash_long((unsigned long)x, pidhash_shift)
(这里吐槽一下,中文互联网真的是喜欢传播旧的东西。一个v2.6的代码,被无数人粘贴复制,这篇2023年的文章,还在用这个宏https://developer.aliyun.com/article/1204882。)
但是很奇怪的是,下边这个commit又说删除了pidhash的相关数据结构,这里可能还有后半再看下,是不是将pidhash的数据结构放在了 idr(ID Radix 树)中,而且确实从代码中发现,只剩下idr init,而没有了hash init。
From e8cfbc245e24887e3c30235f71e9e9405e0cfc39 Mon Sep 17 00:00:00 2001
From: Gargi Sharma <gs051095@gmail.com>
Date: Fri, 17 Nov 2017 15:30:34 -0800
Subject: [PATCH] pid: remove pidhash
pidhash is no longer required as all the information can be looked up
from idr tree. nr_hashed represented the number of pids that had been
hashed. Since, nr_hashed and PIDNS_HASH_ADDING are no longer relevant,
it has been renamed to pid_allocated and PIDNS_ADDING respectively.
2、进程状态
Linux的进程中主要有5种状态:
- R (TASK_RUNNING),就绪态。
- S (TASK_INTERRUPTIBLE),可中断的睡眠状态
- D (TASK_UNINTERRUPTIBLE),不可中断的睡眠状态。
- Z (TASK_DEAD - EXIT_ZOMBIE),僵尸态。
- T (TASK_STOPPED or TASK_TRACED),暂停状态或跟踪状态。
#define TASK_RUNNING 0x00000000
#define TASK_INTERRUPTIBLE 0x00000001
#define TASK_UNINTERRUPTIBLE 0x00000002
#define __TASK_STOPPED 0x00000004
#define __TASK_TRACED 0x00000008
/* Used in tsk->exit_state: */
#define EXIT_DEAD 0x00000010
#define EXIT_ZOMBIE 0x00000020
2.1 就绪态
进程会在以下几种情况下切换到TASK_RUNNING状态(不是全部,举例说明):
-
进程刚被创建时。
当一个新进程被创建时,它的初始状态是TASK_RUNNING。
在早期的内核中,进程是通过
_do_fork来进行创建进程,在v5.10中的commit将其更名为kernel_clonecommit cad6967ac10843a70842cd39c7b53412901dd21f Author: Christian Brauner <brauner@kernel.org> Date: Wed Aug 19 12:46:45 2020 +0200 fork: introduce kernel_clone()在这个函数中
pid_t kernel_clone(struct kernel_clone_args *args) { ...... wake_up_new_task(p); ...... } void wake_up_new_task(struct task_struct *p) { struct rq_flags rf; struct rq *rq; raw_spin_lock_irqsave(&p->pi_lock, rf.flags); WRITE_ONCE(p->__state, TASK_RUNNING); ...... } -
进程从等待状态(TASK_INTERRUPTIBLE或TASK_UNINTERRUPTIBLE)唤醒。
当进程等待某个事件(如I/O完成、信号量可用等)时,它会进入等待状态。当事件发生时,进程会被唤醒并切换到TASK_RUNNING状态。
比较常见的是通过
__wake_up_common来唤醒进程,并继续执行相关的调度。static int __wake_up_common(struct wait_queue_head *wq_head, unsigned int mode, int nr_exclusive, int wake_flags, void *key, wait_queue_entry_t *bookmark) { wait_queue_entry_t *curr, *next; ...... ret = curr->func(curr, mode, wake_flags, key); ...... }通常使用
include/linux/wait.h中定义的.func = default_wake_function,来实现wake操作。int try_to_wake_up(struct task_struct *p, unsigned int state, int wake_flags) { ...... trace_sched_waking(p); ttwu_do_wakeup(p); ...... } static inline void ttwu_do_wakeup(struct task_struct *p) { WRITE_ONCE(p->__state, TASK_RUNNING); trace_sched_wakeup(p); } -
进程从暂停状态(TASK_STOPPED或TASK_TRACED)恢复。
当进程因为接收到SIGSTOP、SIGTSTP、SIGTTIN或SIGTTOU信号而暂停时,它会进入TASK_STOPPED或TASK_TRACED状态。当进程接收到SIGCONT信号时,它会恢复运行并切换到TASK_RUNNING状态。
static bool prepare_signal(int sig, struct task_struct *p, bool force) { ...... } else if (sig == SIGCONT) { unsigned int why; /* * Remove all stop signals from all queues, wake all threads. */ siginitset(&flush, SIG_KERNEL_STOP_MASK); flush_sigqueue_mask(&flush, &signal->shared_pending); for_each_thread(p, t) { ...... wake_up_state(t, __TASK_STOPPED); ...... }可以看到,这里就是从一个
stop状态的进程切换回运行态。 -
执行正常调度的时候
这里是指,在调用
schedule()对queue里的task进行调度时,会自然将进程切换为running态。首先是在
__schedule中,判断当前的进程(将要被切换走的)是不是有未处理的信号,如果有,则直接将这个切成runnnigif (signal_pending_state(prev_state, prev)) { WRITE_ONCE(prev->__state, TASK_RUNNING); }接下来,则是通过cfs,开始选择下一个执行的task,并在context_switch里更换为running状态。
next = pick_next_task(rq, prev, &rf); ...... rq = context_switch(rq, prev, next, &rf);(gpt说的,根本没找到,这里感觉根本就不会,cfs在挑选的时候实在rq中选一个task,而rq中的task已经是running的了,gpt在胡扯)
2.2-TASK_INTERRUPTIBLE
常见于进程完成当前调度任务后主动进入休眠,也可以用与等待部分IO资源。
例如下列这种用法,vcpu线程在执行完当前周期后主动会陷入sleep,并让出CPU,等待下一次调度唤醒。
bool kvm_vcpu_block(struct kvm_vcpu *vcpu)
{
struct rcuwait *wait = kvm_arch_vcpu_get_wait(vcpu);
bool waited = false;
vcpu->stat.generic.blocking = 1;
preempt_disable();
kvm_arch_vcpu_blocking(vcpu);
prepare_to_rcuwait(wait);
preempt_enable();
for (;;) {
set_current_state(TASK_INTERRUPTIBLE); // 设置自身状态为TASK_INTERRUPTIBLE
if (kvm_vcpu_check_block(vcpu) < 0)
break;
waited = true;
schedule(); // 主动让出CPU,正式sleep
}
preempt_disable();
finish_rcuwait(wait);
kvm_arch_vcpu_unblocking(vcpu);
preempt_enable();
vcpu->stat.generic.blocking = 0;
return waited;
}
可被signal唤醒。
2.3-TASK_UNINTERRUPTIBLE
主要是在等待资源,例如关键的IO资源,例如下列这段md_bitmap_startwrite部分函数
if (unlikely(COUNTER(*bmc) == COUNTER_MAX)) {
DEFINE_WAIT(__wait);
/* note that it is safe to do the prepare_to_wait
* after the test as long as we do it before dropping
* the spinlock.
*/
prepare_to_wait(&bitmap->overflow_wait, &__wait,
TASK_UNINTERRUPTIBLE);
spin_unlock_irq(&bitmap->counts.lock);
schedule();
finish_wait(&bitmap->overflow_wait, &__wait);
continue;
}
有时在进程进入关键流程后,也会将其设置为TASK_UNINTERRUPTIBLE,比如在kthread_stop中等待进程完成并返回时,会将自身设置成TASK_UNINTERRUPTIBLE,避免被再次其他信号意外唤醒。
void __sched wait_for_completion(struct completion *x)
{
wait_for_common(x, MAX_SCHEDULE_TIMEOUT, TASK_UNINTERRUPTIBLE);
}
不可被signal唤醒,只能靠自身调度唤醒。
2.4-EXIT_ZOMBIE&EXIT_DEAD
当一个子进程结束执行(即完成它的任务或被终止),但其父进程尚未通过调用 wait() 系列函数来读取子进程的退出状态时,子进程会进入 EXIT_ZOMBIE 状态。在这种状态下,子进程的大部分资源都被释放了,但它在进程表中保留了一个条目,其中包含了退出状态、进程ID等信息,以便父进程稍后查询。在do_exit()中通知父进程的函数值会设置进程的僵尸态。
static void exit_notify(struct task_struct *tsk, int group_dead)
{
bool autoreap;
struct task_struct *p, *n;
LIST_HEAD(dead);
......
tsk->exit_state = EXIT_ZOMBIE;
......
}
当父进程通过 wait() 系列函数读取了僵尸子进程的退出状态后,子进程的状态会变为 EXIT_DEAD。在这个状态下,子进程的进程表条目和剩余资源将被彻底释放和回收。在wait_task_zombie中会设置相关状态。
/*
* Handle sys_wait4 work for one task in state EXIT_ZOMBIE. We hold
* read_lock(&tasklist_lock) on entry. If we return zero, we still hold
* the lock and this task is uninteresting. If we return nonzero, we have
* released the lock and the system call should return.
*/
static int wait_task_zombie(struct wait_opts *wo, struct task_struct *p)
{
......
if (state == EXIT_TRACE) {
write_lock_irq(&tasklist_lock);
/* We dropped tasklist, ptracer could die and untrace */
ptrace_unlink(p);
/* If parent wants a zombie, don't release it now */
state = EXIT_ZOMBIE;
if (do_notify_parent(p, p->exit_signal))
state = EXIT_DEAD;
p->exit_state = state;
write_unlock_irq(&tasklist_lock);
}
if (state == EXIT_DEAD)
release_task(p);
......
}
2.5-__TASK_TRACED&__TASK_TRACED
__TASK_TRACED进程被追踪之后的状态。
static inline void ptrace_signal_wake_up(struct task_struct *t, bool resume)
{
unsigned int state = 0;
if (resume) {
t->jobctl &= ~JOBCTL_TRACED;
state = __TASK_TRACED;
}
signal_wake_up_state(t, state);
}
__TASK_STOPPED 状态表示进程已经停止执行,通常是因为收到了如 SIGSTOP、SIGTSTP、SIGTTIN 或 SIGTTOU 等信号。
例如do_signal_stop中会设置进程为set_special_state(TASK_STOPPED);
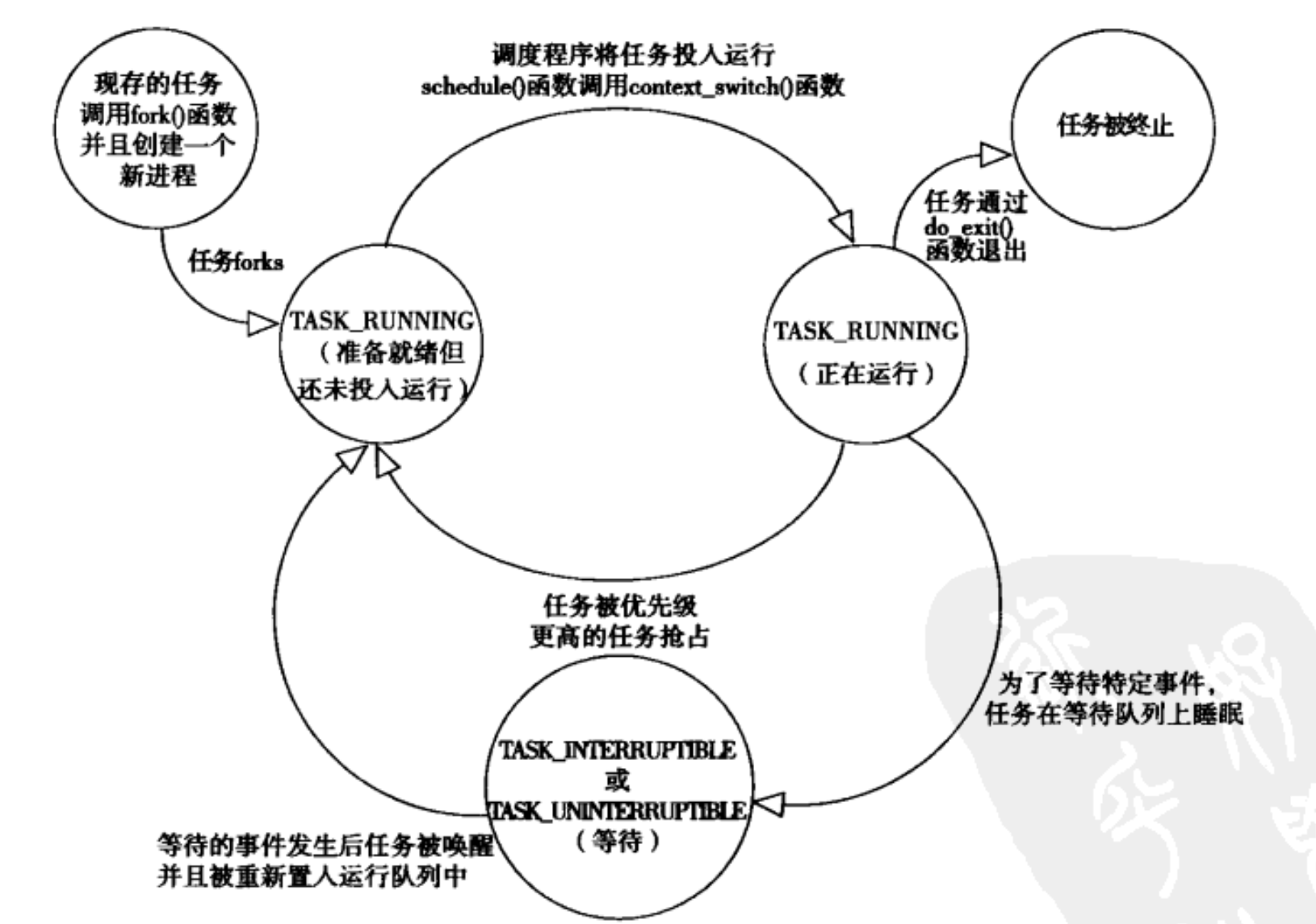
3、进程状态的转换